Explorar las categorías
Explora
Fiverr Pro
Español
$
USD
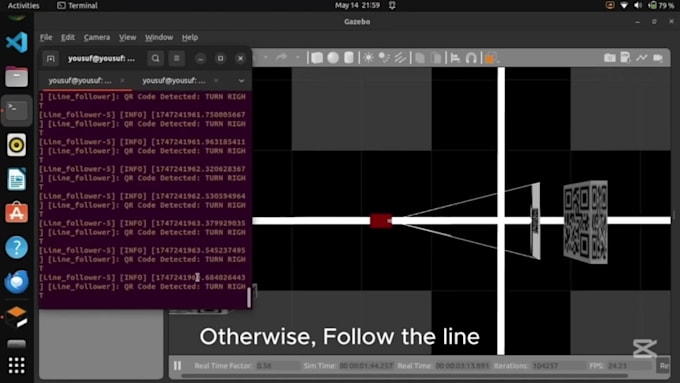
Dando vida a robots y convirtiendo datos en inteligencia
¿Tienes dificultades con la simulación en ROS2 o el modelado de robots?
Soy estudiante de Ingeniería en Mecatrónica con experiencia práctica en ROS2, Gazebo, RViz, URDF y Xacro. Te ayudaré a:
Crear un modelo de robot usando URDF/Xacro
Simularlo en Gazebo
Visualizarlo en RViz
Agregar sensores y plugins
Configurar archivos de lanzamiento y paquetes
Ya sea que estés trabajando en un proyecto universitario, investigación o una startup, puedo construir o solucionar problemas en tu simulación de ROS2. Demos vida a tu robot




Traducción automática
¿Qué necesito para empezar?
Simplemente describe tu proyecto. Comparte bocetos, requisitos o código parcial.
¿Puedes ayudar también con proyectos de ROS1?
Actualmente me enfoco en ROS2, pero no dudes en preguntar.
¿Qué sistema operativo soportas?
Ubuntu (22.04) – ROS2 Humilde
| (1) | ||
| (0) | ||
| (0) | ||
| (0) | ||
| (0) |

alxberman

Estados Unidos
Excellent work. Great attention to detail.
USD50-USD100
Precio
2 días
Tiempo
| (1) | ||
| (0) | ||
| (0) | ||
| (0) | ||
| (0) |
alxberman
Estados Unidos
Excellent work. Great attention to detail.
USD50-USD100
Precio
2 días
Tiempo