Explorar las categorías
Explora
Fiverr Pro
Español
$
USD
Nivel 1
Ha cumplido determinados criterios de rendimiento y muestra un gran potencial en la plataforma.
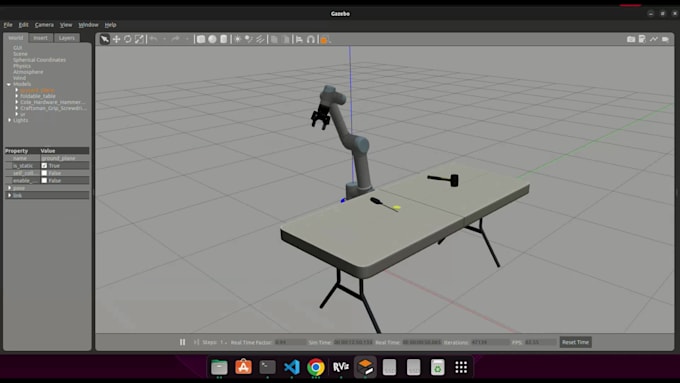
Te ayudaré a simular brazos robóticos con planificación de movimiento y control en ROS2 Gazebo. Puedo ofrecer soluciones personalizadas adaptadas a tus necesidades.
¿Por qué elegirme?