Explorar las categorías
Explora
Fiverr Pro
Español
$
USD




_compressed_lolonp.jpg)

Traducción automática
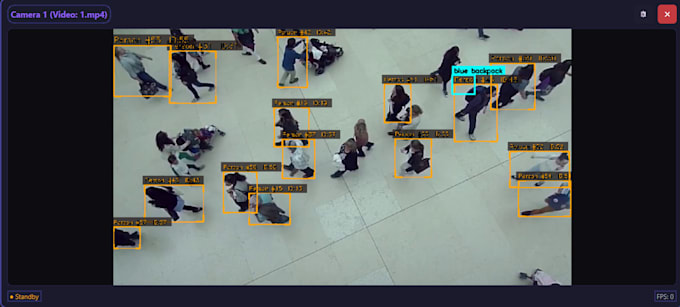
¿Luchas con modelos que fallan en tus datos del mundo real? construyo sistemas completos de visión por computadora listos para producción desde cero.
lo que entrego:
-modelo personalizado entrenado con tu conjunto de datos o el mío
-cualquier tarea de visión por computadora: detección, clasificación, segmentación, detección de anomalías
-aplicación de escritorio o web con entrada en vivo de cámara/video
-optimizado para tu hardware (pc, dispositivo edge, jetson, pi)
-código Python limpio y documentado que tú posees completamente
lo que puedo construir:
-detección de objetos y multi-clase
️-detección de anomalías y defectos
-inspección de calidad industrial
️-detección facial y control de acceso
-cualquier caso de uso personalizado de visión por computadora
pila tecnológica:
python | pytorch | tensorflow | opencv | pyside6
por qué yo:
ingeniero en computación industrial y múltiple campeón nacional de robótica. escribo código optimizado y probado en batalla, diseñado para entornos industriales reales, no herramientas de arrastrar y soltar.
cómo funciona:
por favor, envíame un mensaje antes de ordenar.
Industrial Automation and Robotic Engineer
Idiomas
Traducción automática