Explorar las categorías
Explora
Fiverr Pro
Español
$
USD
Ingeniero de Diseño Fabricación
Nivel 2
Ha cumplido con los criterios de alto rendimiento y tiene un historial comprobado de cumplimiento de las expectativas de los clientes.
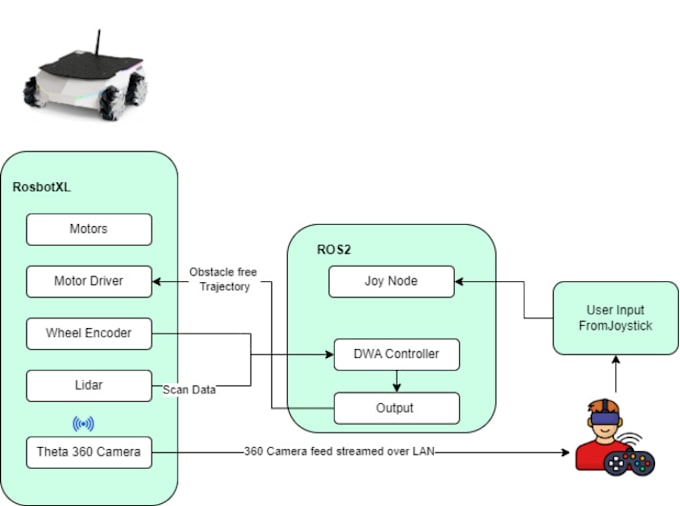
¿Estás construyendo un robot móvil o un sistema autónomo y necesitas apoyo experto con ROS 2? ¡Has llegado al lugar correcto! Me especializo en desarrollar proyectos avanzados de robótica usando ROS 2, con enfoque en:
Lo que ofrezco:
Pila de navegación (Nav2)
¿Necesitas que tu robot navegue de forma autónoma por mapas, evite obstáculos o siga puntos de referencia? Configuraré y ajustaré toda la pila Nav2, incluyendo mapeo, localización, planificación de rutas y árboles de comportamiento.
Cinemática de robots
Implementaré y validaré la cinemática directa e inversa para bases móviles diferenciales, omnidireccionales o personalizadas.
Controladores personalizados en Python
Desde escribir nodos ROS 2 en Python hasta crear controladores personalizados para planificación de movimiento o fusión de sensores, puedo adaptar soluciones a tus necesidades robóticas únicas.
Simulación (Gazebo, RViz)
Prueba tu robot en simulación antes de pasar al mundo real. Soporto Gazebo/Ignition, RViz2 y más.
¡Construyamos tu robot juntos!
Envíame un mensaje antes de hacer tu pedido para entender tus necesidades y ofrecerte la mejor solución.
Saludos,
Syed Huzaifa




Plataforma:
Raspberry Pi
Sensores:
Acelerómetro
•
Cámara
•
Lidar
•
Posición
•
Ubicación
Experiencia:
Microcontroladores
•
IoT
•
ROS
•
AI
•
Programación