Explorar las categorías
Explora
Fiverr Pro
Español
$
USD
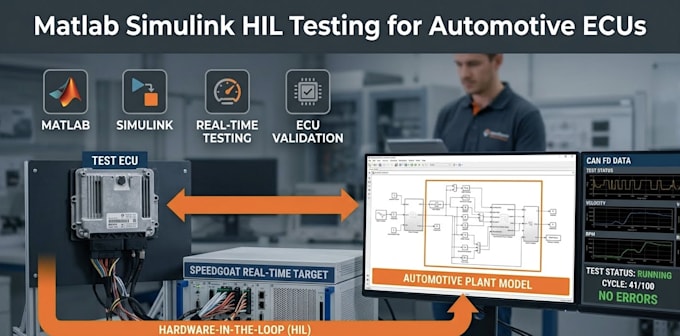
¿Tienes dificultades para mover tus modelos de Simulink de una simulación en escritorio a hardware HIL físico?
Vamos a cerrar la brecha entre tu código virtual y las unidades de control electrónico (ECUs) físicas. Configuro, optimizo y despliego entornos robustos de pruebas Hardware-in-the-Loop (HIL) usando MATLAB, Simulink Real-Time y hardware de Speedgoat o dSPACE.
Si tu modelo presenta errores en el solver, falla en la ejecución de pasos fijos o no tiene un mapeo correcto de hardware a software I/O, puedo intervenir y solucionarlo.
Lo que manejo para tu configuración:
Por favor, envíame un mensaje para discutirlo mejor.
¡Gracias!