Explorar las categorías
Explora
Fiverr Pro
Español
$
USD
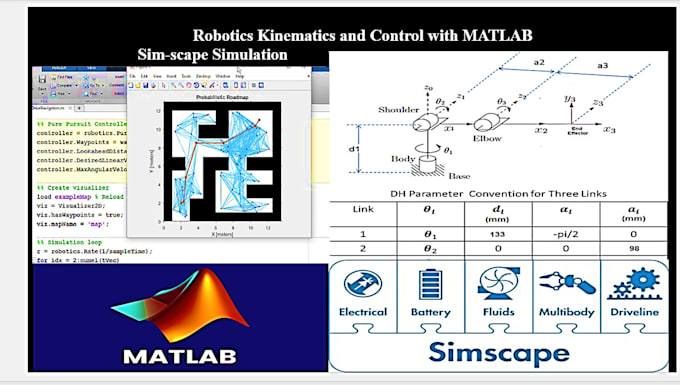
Soy experto en proyectos e investigaciones sobre cinemática de robótica. Te ayudaré con el análisis de cinemática y dinámica de brazos robóticos con múltiples grados de libertad
La cinemática incluye
Evaluación de grados de libertad
La dinámica incluye
Software:
Por favor, si tienes alguna duda, contacta conmigo antes de hacer el pedido