Explorar las categorías
Explora
Fiverr Pro
Español
$
USD




Traducción automática
Antes de estrellar un dron personalizado de 5000 dólares o arriesgarte a dañar un prototipo físico, necesitas una simulación precisa en física.
Probar tu código en un entorno virtual es la forma más segura y económica de desarrollar robótica. Garantiza cero riesgo para tu hardware y te ahorra miles en costos de reparación y reemplazo.
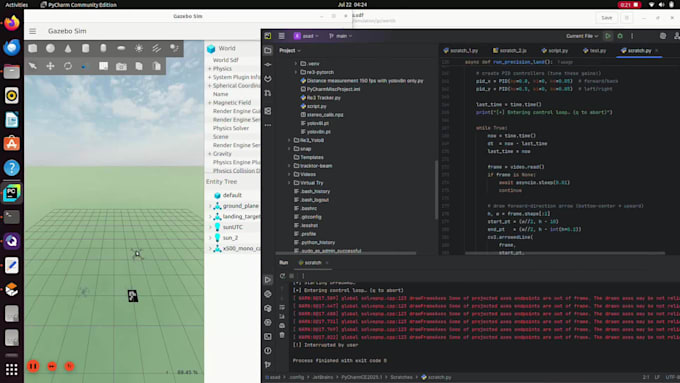
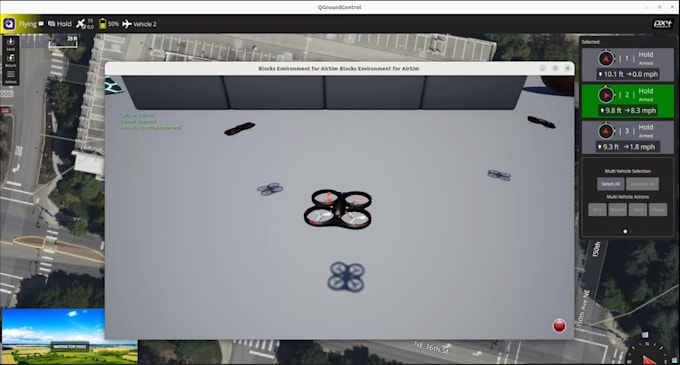
Soy ingeniero en robótica y aeroespacial que crea entornos de prueba personalizados en Gazebo y Unity. Ya sea que necesites ayuda para convertir un archivo CAD en un URDF funcional, o un entorno 3D complejo con física avanzada y control/navegación integrados, puedo construir exactamente lo que tu proyecto requiere.
Lo que puedo hacer por tu proyecto:
Herramientas: Gazebo, Unity3D, ROS/ROS2, Python, C++, SolidWorks.
AI Developer, Robotics Engineer, FPV Drone Design Expert
Idiomas
Traducción automática
Traducción automática
¿Qué tipos de proyectos son los más adecuados para tus simulaciones?
Son perfectas para probar rovers autónomos (UGVs), drones personalizados (UAVs) y brazos robóticos. Si necesitas probar stacks de navegación ROS/ROS2, algoritmos de visión por computadora o verificar restricciones físicas antes de construir hardware real, estas simulaciones son la opción ideal.