Implementa una navegación autónoma y confiable en tu plataforma móvil. Me especializo en configurar, ajustar y depurar el ROS 2 Navigation Stack (Nav2) y los pipelines de SLAM para garantizar una localización robusta y una planificación de rutas fluida.
Alcance técnico:
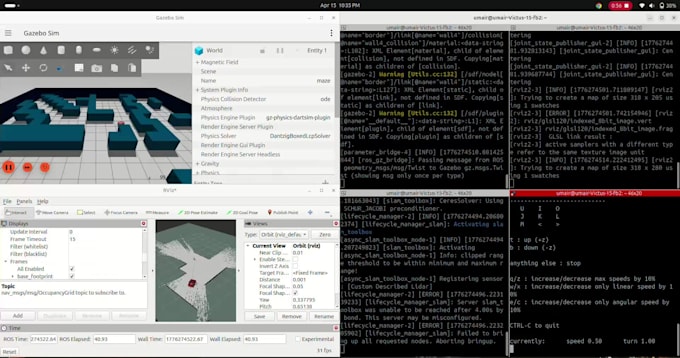
- Mapeo y SLAM: Configuración de SLAM Toolbox o Cartographer para generar mapas de ocupación en 2D de alta resolución.
- Ajuste de localización: Optimización de los parámetros de AMCL (localización adaptativa de Monte Carlo) para evitar dispersión y deriva de partículas.
- Configuración de costmaps: Ajuste de los costmaps globales y locales, radios de inflación y capas de obstáculos para evitar colisiones de forma segura.
- Planificación de rutas y control: Ajuste del árbol de comportamiento junto con configuraciones personalizadas para planificadores y controladores (Dijkstra, DWA o TEB Local Planner).
Compatible con configuraciones tanto de ROS 2 Humble como Jazzy. Por favor, proporciona los detalles de tu URDF o entorno Gazebo antes de comenzar.