Explorar las categorías
Explora
Fiverr Pro
Español
$
USD
Vencer el mal con el bien es el bien, resistir el mal con el mal es el mal
Nivel 1
Ha cumplido determinados criterios de rendimiento y muestra un gran potencial en la plataforma.
ROS es ampliamente utilizado en la industria de robots. Crear un paquete ROS es necesario para usar tu robot personalizado.
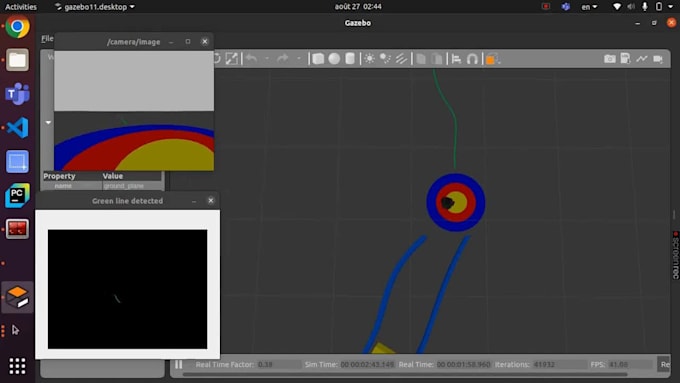
Aquí, crearé un paquete ROS para tu robot que puede ser un robot localizado o manipulado. Utilizaré el archivo URDF para modelar el robot y visualizarlo en Gazebo.
Se requieren las especificaciones del robot personalizado por parte del comprador.
Puedes considerar tener un paquete ROS profesional que incluya todos los controladores y plugins de gazebo para escaneo láser, cámara, controladores de articulaciones y también un mapa para SLAM.
Realizaré tus simulaciones ROS desde simulaciones básicas con Turtlesim hasta simulaciones avanzadas.