Explorar las categorías
Explora
Fiverr Pro
Español
$
USD
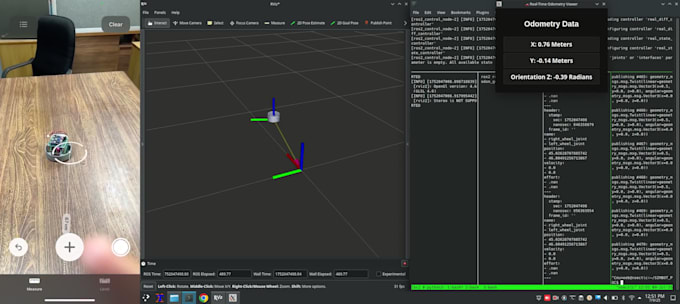
Soluciones de AI, DeepStream y Robotics optimizadas para tus dispositivos edge
¿Estás buscando integrar AI en el edge para tu aplicación de robótica? Me especializo en construir soluciones de Edge AI aceleradas por hardware usando ROS2, perfectamente adaptadas para sistemas robóticos en tiempo real y con baja latencia.
Como experto en robótica y ROS2, te ayudaré a desplegar aplicaciones inteligentes directamente en hardware de edge como Jetson Nano, Xavier, Raspberry Pi, Coral TPU y más, permitiendo inferencia offline, fusión de sensores y control en tiempo real usando modelos avanzados de AI.
Lo que ofrezco:
Tecnologías que utilizo:
Ideal para:


Plataforma:
NVIDIA Jetson
Sensores:
Acelerómetro
•
Ultrasónico
•
Infrarrojo
•
Cámara
Traducción automática
Q1: ¿Qué tipo de plataformas de hardware soportas?
A: Soporto una amplia gama de dispositivos de edge incluyendo NVIDIA Jetson Nano/Xavier, Raspberry Pi 4, Intel NUC, Coral Dev Board y otras plataformas ARM/x86.
Q2: ¿Puedes desplegar modelos de AI como YOLO o estimación de pose en dispositivos de edge?
A: ¡Sí! Puedo optimizar y desplegar modelos como YOLOv5, YOLOv8, MoveNet y CNNs personalizadas usando TensorRT, ONNX o TensorFlow Lite para inferencia eficiente en edge.
Q3: ¿Integrarás el modelo de AI en un nodo de ROS2?
A: Absolutamente. Crearé o modificaré nodos de ROS2 para envolver tu modelo de AI, publicar resultados de inferencia e integrarlo con tu pipeline de control robótico.
Q4: ¿Proporcionas interfacing de hardware como control de motores o lectura de sensores?
A: Sí, puedo conectar tu hardware (por ejemplo, motores, cámaras, LIDAR, IMUs, etc.) con ROS2 usando controladores personalizados o estándar.
Q5: Ya tengo un modelo de AI entrenado — ¿puedes desplegarlo en mi hardware?
A: ¡Por supuesto! Solo comparte el archivo y formato del modelo, y me encargaré de la conversión, optimización e integración en ROS2 para despliegue en edge.