Explorar las categorías
Explora
Fiverr Pro
Español
$
USD





Traducción automática
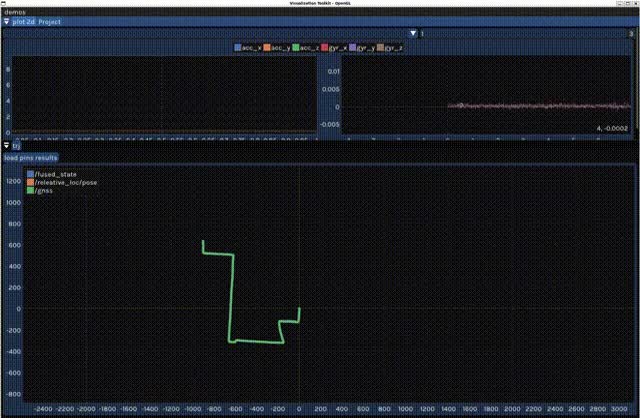
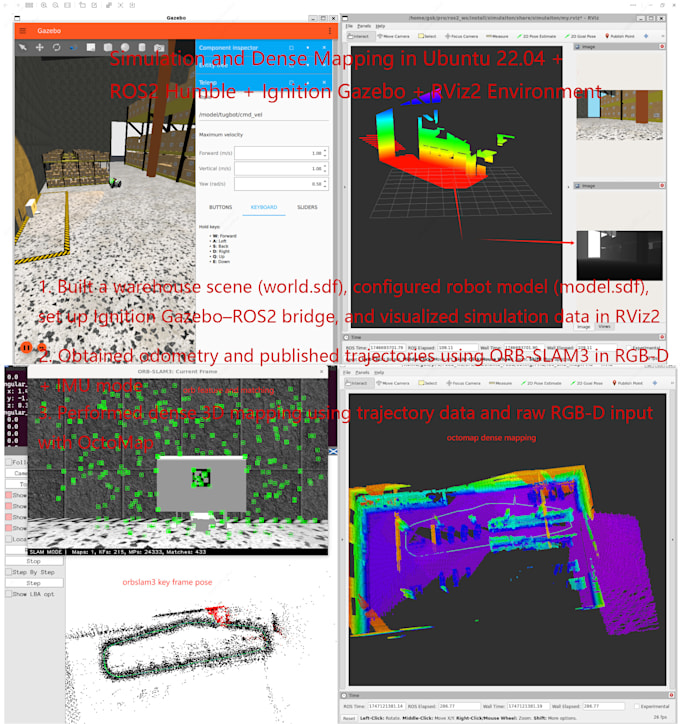
Ofrezco desarrollo profesional en C++ para proyectos de robótica y automatización, con experiencia en implementación de algoritmos, desarrollo de controladores y pruebas de simulación. Ya sea que necesites un pequeño nodo ROS2, una interfaz Qt o un sistema completo de SLAM con simulación en Gazebo, puedo ayudarte a construir soluciones eficientes, modulares y listas para producción. Estoy aquí para apoyar tus ideas, simples o complejas, con código limpio y confiable.
Lo que ofrezco:
Por qué elegirme:
Antes de hacer tu pedido:
Por favor, contáctame primero para discutir el alcance de tu proyecto, el plazo y las expectativas. Esto asegura que estemos completamente alineados antes de comenzar.
Idiomas
Traducción automática
Traducción automática
¿Ofrecen revisiones después de la entrega?
Sí. Ofrezco una revisión gratuita dentro del alcance original del proyecto. Si la solicitud de revisión incluye nuevas funciones o va más allá de los requisitos acordados, puede aplicarse un cargo adicional. Siempre confirmaré contigo antes de realizar cualquier actualización fuera del alcance.
¿Qué pasa si mi proyecto es más complejo o lleva más tiempo que el plazo de entrega listado?
Para tareas complejas o soporte a largo plazo, puedo proponer un plazo de entrega más largo. En estos casos, el precio también puede ajustarse para coincidir con el alcance y el tiempo requerido. Por favor, contáctame primero para que podamos discutir el mejor plan para tu proyecto.
¿Puedes manejar algoritmos personalizados o sistemas avanzados de robótica?
Por supuesto. Me especializo en implementación de algoritmos en C++, integración con ROS2, desarrollo de SLAM y pruebas de simulación con Gazebo. Disfruto abordar proyectos técnicamente desafiantes y entregar código modular y optimizado para investigación o uso en producción.
¿Qué información necesitas antes de iniciar el proyecto?
Proporciona una descripción clara de tus requisitos, incluyendo objetivos técnicos, herramientas preferidas (por ejemplo, Qt, ROS2, OpenGL), materiales de referencia y resultados esperados. Cuantos más detalles compartas desde el principio, más fluido será el proceso de desarrollo.
¿Podemos discutir el proyecto antes de realizar un pedido?
Sí, recomiendo encarecidamente enviarme un mensaje antes de hacer un pedido, especialmente para tareas personalizadas o complejas. Esto ayuda a asegurar que estemos alineados en objetivos, plazo y precio antes de comenzar.
¿Proporcionas documentación o comentarios en el código?
Sí, para la mayoría de los paquetes ESTÁNDAR y PREMIUM, incluyo código bien estructurado con comentarios en línea y también puedo proporcionar documentación técnica básica a solicitud.
🔒 ¿Se mantendrá confidencial mi proyecto y código?
Por supuesto. Trato todos los proyectos con estricta confidencialidad. A menos que solicites soporte continuo o futuras actualizaciones, eliminaré permanentemente todo el código entregado y archivos relacionados una semana después de la entrega exitosa.