Explorar las categorías
Explora
Fiverr Pro
Español
$
USD
¿Estás construyendo un robot o sistema autónomo y necesitas una solución completa de robótica, no solo código aislado?
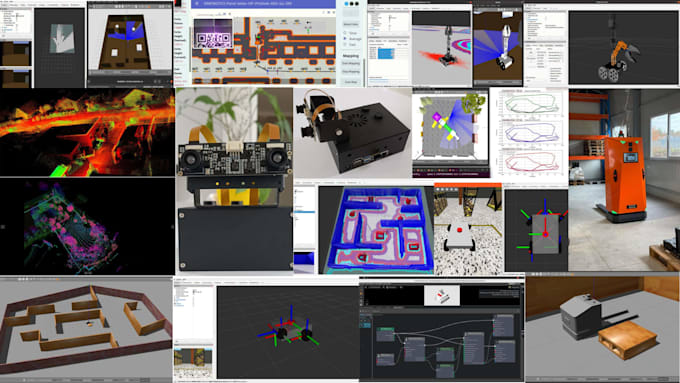
Ofrezco soluciones de software de robótica de extremo a extremo, enfocándome en el sistema completo del robot desde percepción y localización hasta navegación, control, simulación e integración del sistema. Mi objetivo es ayudarte a construir un robot confiable, bien estructurado y escalable, ya estés en la etapa de prototipo o desplegando en hardware real.
Trabajo con robots reales y simulaciones, integrando sensores como LiDAR, IMU, cámaras y encoders, diseñando sistemas de movimiento y navegación, creando simulaciones para pruebas y depuración de problemas complejos del mundo real. ROS2 es una de las herramientas que uso, pero mi enfoque siempre está en resolver problemas de robótica como un sistema completo, no solo nodos individuales.
Este servicio es adecuado para startups, empresas, investigadores y estudiantes que necesitan soporte profesional para proyectos de robótica, robots autónomos o pilas de software complejas.
Recibirás soluciones limpias, documentadas, explicaciones claras y orientación práctica adaptada a tu robot y caso de uso.
Por favor, envíame un mensaje antes de ordenar para que podamos discutir tu robot, objetivos y la mejor estrategia.


Traducción automática
¿En qué tipo de proyectos de robótica trabajas?
Trabajo en una amplia variedad de proyectos de robótica, incluyendo robots autónomos, robots móviles, plataformas de investigación y sistemas robóticos personalizados. Mi enfoque es ofrecer soluciones completas de robótica que cubran percepción, localización, navegación, control, simulación e integración del sistema.
¿Solo trabajas con ROS2?
No. ROS2 es una de las herramientas que uso, pero mi enfoque principal es el diseño de sistemas de robótica en general y la resolución de problemas. Elijo el mejor enfoque y herramientas según las necesidades de tu robot y proyecto.
¿Puedes trabajar con robots reales o solo con simulaciones?
Trabajo con ambos. Puedo apoyar tanto en desarrollo basado en simulación como en hardware real, incluyendo integración de sensores, control y depuración en el mundo real.
¿Puedes ayudar a mejorar o arreglar un sistema de robótica existente?
Sí. Frecuentemente ayudo a clientes a depurar, optimizar y mejorar software de robótica existente, incluyendo problemas de rendimiento, inestabilidad y problemas de integración.
¿Proporcionas documentación y explicaciones?
Sí. Todas las soluciones entregadas incluyen documentación y explicaciones claras para que entiendas cómo funciona el sistema y puedas mantenerlo en el futuro.
¿Debo comunicarme con usted antes de realizar un pedido?
Sí, por favor. Enviarme un mensaje antes de ordenar me ayuda a entender tu robot, objetivos y restricciones para poder sugerir la mejor solución y plan de entrega.